
Например, термин PMSM (СДПМ) может применяться для обозначения двигателя с постоянными магнитами на роторе, независимо от формы его ЭДС, но так же часто его применяют, подразумевая исключительно синусоидальную форму ЭДС двигателя.
Термин BLDC (БДПТ) может применяться для обозначения двигателя с постоянными магнитами на роторе и трапецеидальной ЭДС, а может вообще обозначать не двигатель, а некий мехатронный узел, включающий в себя:
- двигатель с постоянными магнитами и трапецеидальной ЭДС
- датчик положения ротора
- управляемый по сигналам этого датчика полупроводниковый коммутатор.
Собственно этот мехатронный узел, который может, как и двигатель постоянного тока, управляться постоянным напряжением, и породил сам термин BLDC (БДПТ).
Ещё по отношению к синхронным двигателям с постоянными магнитами на роторе в отечественной литературе, можно встретить название «вентильный двигатель».
Попытки автора разобраться с этим термином быстро зашли в тупик, так как в различных источниках обнаружились явные противоречия.
Например, в книге Г.Б. Онищенко «Электрические двигатели» на стр. 47 «вентильным» называется двигатель соответствующий термину BLDC (БДПТ), что предполагает трапецеидальную ЭДС, и это понимаемо.
Но двигатели типа 5ДВМ сам производитель (ЧЭАЗ) называет «вентильными», хотя при этом утверждает, что они имеют синусоидальную ЭДС.
А вот «Википедия»: «Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре…».
Ну...приехали...
Какой термин, какой форме ЭДС соответствует – непонятно.
А между тем, именно эта форма определяет выбор структуры системы управления двигателем.
Как человек, занимающийся этим управлением, хочу предложить:
- во избежание путаницы забыть термин «вентильный двигатель»
- термином БДПТ обозначать не двигатель, а исключительно описанный выше мехатронный узел (аналог двигателя постоянного тока)
- делить синхронные двигатели с постоянными магнитами на роторе (СДПМ) по типу ЭДС на две группы:
с синусоидальной ЭДС (далее, для краткости, - СДПМс)
с трапецеидальной ЭДС (далее, для краткости, - СДПМт)
Управление
При управлении двигателями с синусоидальной ЭДС используется векторное регулирование (подробно описано в книжке по ссылке https://3v-services.com/books/978-5-97060-766-4/978-5-97060-766-4_SimInTech-01.pdf). С точки зрения возможностей и качества управления это наилучший вариант.
Однако и двигатели с трапецеидальной ЭДС в силу более простой конструкции статорных обмоток и возможности более простого управления применяются довольно часто.
Конструкция двигателей
Форма ЭДС определяется конструкцией двигателя.
Ротор синхронных двигателей представляет собой магнит с различным количеством пар полюсов.
На Рис 1. показаны возможные конструкции статорных обмоток. Обычно синусоидальной ЭДС соответствует «распределенная» намотка, а трапецеидальной «сосредоточенная».

Рис.1
Статорная обмотка двигателя с трапецеидальной ЭДС проще и технологичнее, за счёт этого цена такого двигателя несколько ниже.
Далее остановимся более подробно на двигателе с трапецеидальной ЭДС (СДПМт)
Двигатель с одной парой полюсов будет выглядеть в разрезе так, как показано на Рис.2.

Рис.2
На статоре СДПМт намотаны три обмотки (А, В, С), сдвинутые в пространстве на 120º. Каждая обмотка состоит из двух секций, включённых встречно. Таким образом, при протекании тока в обмотке она создаёт внутри двигателя два полюса (положительный и отрицательный), к которым и притягивается магнитный ротор. Поочередное изменение токов в обмотках переключает полюса обмоток и заставляет ротор двигаться вслед за полем. На этом и основан принцип работы двигателя.
Уравнения равновесия статорных обмоток двигателя
Уравнения равновесия статорных обмоток двигателя при его включении в «звезду» в неподвижных фазных координатах АВС имеют вид (1).
 (1)
(1)
Здесь:
![]() - фазные напряжения
- фазные напряжения
![]() - потокосцепления фазных обмоток
- потокосцепления фазных обмоток
![]() - токи фаз
- токи фаз
![]() - активное сопротивление фазной обмотки.
- активное сопротивление фазной обмотки.
Поток в обмотке каждой фазы формируется из следующих составляющих:
- поток, наводимый собственным током фазы
- поток, наводимый магнитными полями других фазных обмоток
- поток, наводимый в обмотке магнитами ротора.
Проиллюстрируем это системой (2):
 (2)
(2)
Где:
![]() - индуктивность фазных обмоток
- индуктивность фазных обмоток
![]() - взаимные индуктивности обмоток
- взаимные индуктивности обмоток
![]() - потокосцепления, наводимые в обмотках магнитом ротора.
- потокосцепления, наводимые в обмотках магнитом ротора.
В общем случае все индуктивности системы (2) могут являться переменными функциями угла поворота поля ![]() .
.
В частном случае для неявнополюсного двигателя (при цилиндрическом роторе) индуктивности и взаимные индуктивности обмоток не зависят от угла.
Обозначив
![]() - индуктивность фазной обмотки,
- индуктивность фазной обмотки,
![]() - взаимная индуктивность двух фазных обмоток,
- взаимная индуктивность двух фазных обмоток,
и подставив выражения (2) в систему (1), получим выражение (3):
 (3)
(3)
Заметив, что производные по времени от потокосцеплений магнитов ротора

есть не что иное, как наводимая магнитами ротора в этих обмотках ЭДС, систему (3) можно переписать в виде (4).
 (4)
(4)
Теперь введем понятие единичной функции формы ЭДС.
Единичная функция формы ЭДС - это функция от угла поля (![]() ), имеющая единичную амплитуду и повторяющая по форме ЭДС. Для фаз А, В, С обозначим эти функции:
), имеющая единичную амплитуду и повторяющая по форме ЭДС. Для фаз А, В, С обозначим эти функции: ![]()
Используя единичные функции формы, мгновенные ЭДС в фазах можно
представить выражением (5): (5)
(5)
Где:![]() - амплитуда потокосцепления ротора и фазной обмотки
- амплитуда потокосцепления ротора и фазной обмотки![]() - скорость вращения поля
- скорость вращения поля![]() - скорость вращения ротора
- скорость вращения ротора![]() - число пар полюсов двигателя.
- число пар полюсов двигателя.
Зависимости единичных функций формы ЭДС обмоток СДПМт от угла
поворота поля представлены На Рис.3.

Рис. 3
Вывод формулы для расчёта электромагнитного момента СДПМт
Момент, создаваемый двигателем, является суммой моментов, создаваемых его обмотками.
Посмотрим на уравнение равновесия обмотки фазы А из системы (4).

Умножив обе его части на ток обмотки, получим уравнение для мгновенной электрической мощности обмотки:

Рассмотрим составляющие этой мощности:
 - реактивная мощность обмотки
- реактивная мощность обмотки![]() - активная мощность, рассеивающаяся в обмотке
- активная мощность, рассеивающаяся в обмотке![]() - мощность, создающая электромагнитный момент.
- мощность, создающая электромагнитный момент.
Если пренебречь потерями при переходе электрической мощности в механическую, то можно записать:
![]() ,
,
или:
 (6)
(6)
Где:
![]() - электромагнитный момент двигателя
- электромагнитный момент двигателя
![]() - угловая скорость вращения ротора.
- угловая скорость вращения ротора.
Подставив в формулу (6) значения ЭДС из соотношений (5), получим формулу вычисления электромагнитного момента ротора (7).
![]() (7)
(7)
Коммутация обмоток СДПМт
В соответствии с формулой (7) момент СДПМт пропорционален сумме произведений фазных токов на функции формы соответствующих ЭДС.
Максимальное значение ЭДС обмотки соответствует плоским участкам трапеции ЭДС. Если бы нам удалось на этих участках угловой траектории сформировать в обмотках токи некоторой постоянной амплитуды, например, совпадающие по знаку со знаком ЭДС, то это позволило бы сформировать при этих токах максимальный постоянный положительный момент.
Для примера рассмотрим на Рис.3 участок угловой траектории от ![]() /6 до
/6 до ![]() /2. На этом участке ЭДС в фазе А имеет максимально отрицательное значение, а в фазе В максимально положительное. Следовательно, для получения положительного момента на этом участке угловой траектории надо обеспечить в фазе А отрицательное, а в фазе В положительное значение тока. Для этого фазу А можно подключить на отрицательный, а фазу В на положительный полюса внешнего источника постоянного напряжения (Udc). При этом фаза С не используется (отключена от источника Udc).
/2. На этом участке ЭДС в фазе А имеет максимально отрицательное значение, а в фазе В максимально положительное. Следовательно, для получения положительного момента на этом участке угловой траектории надо обеспечить в фазе А отрицательное, а в фазе В положительное значение тока. Для этого фазу А можно подключить на отрицательный, а фазу В на положительный полюса внешнего источника постоянного напряжения (Udc). При этом фаза С не используется (отключена от источника Udc).
Величина тока, протекающего через обмотки, будет в свою очередь определяться прикладываемым к обмоткам напряжением, величиной ЭДС и параметрами обмоток.
Если рассуждать таким образом, то можно составить таблицу коммутаций обмоток, обеспечивающих в зависимости от положения ротора момент нужного знака (Табл. 1).
Табл.1 Алгоритм коммутации

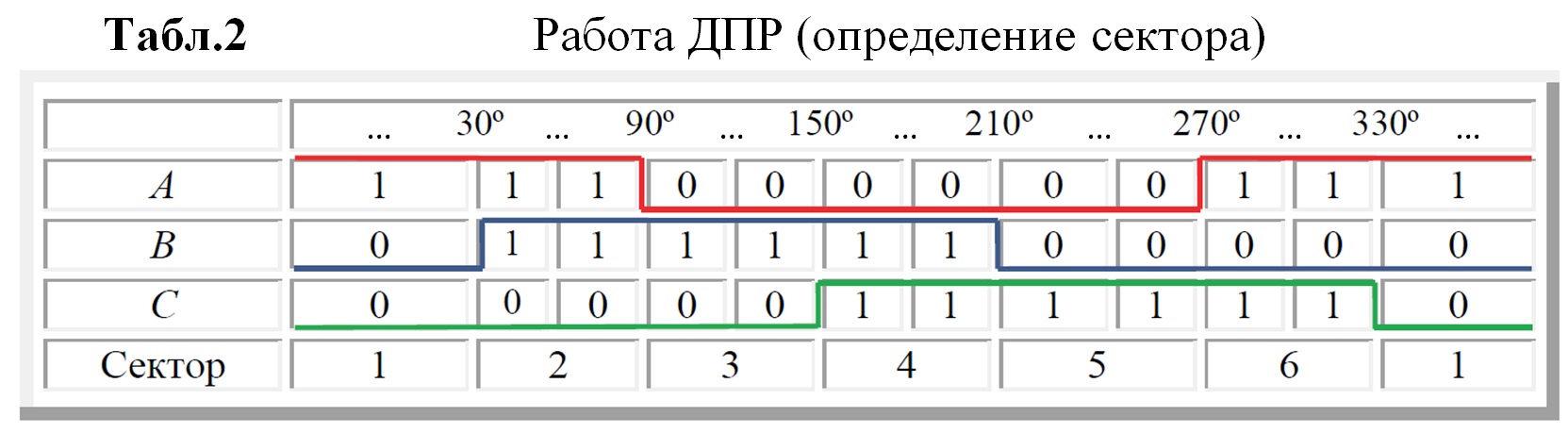
Обмотки трёхфазного двигателя можно коммутировать на внешний источник напряжения с помощью трехфазного мостового инвертора. Для этого состояние инвертора надо поставить в зависимость от положения ротора. Обычно это делается с помощью датчика положения ротора (ДПР). Этот датчик имеет три канала. Каждый канал выдает за один оборот двигателя импульс, соответствующий половине периода вращения, при этом импульсы в каналах сдвинуты на 120º.
Логическая обработка сигналов ДПР позволяет определить в каком из шести секторов в данный момент находится ротор.
Работа ДПР поясняется Табл. 2.
Возможная структура системы управления моментом СДПМт
Алгоритм, описанный в Табл.1, предполагает протекание одного и того же тока в двух фазах двигателя при единичном значении функции формы ЭДС в обмотках фаз. Поэтому выражение (7) можно переписать в виде (8).
![]() (8)
(8)
Где:
![]() - значение тока в фазах
- значение тока в фазах
То есть значение момента пропорционально величине тока в обмотках двигателя.
Вытекающая из формулы (8) структура системы управления моментом в приводе с СДПМт изображена на Рис.4.

Рис. 4
Данная структура позволяет получить нужный момент, формируя в обмотках двигателя ток необходимой амплитуды, при сохранении алгоритма коммутации (Табл.1).
Эта задача решается с помощью создания на базе трёхфазного мостового инвертора контура тока с ШИМ.
Регулятор тока (ПИ-рег.) формирует сигнал задания напряжения обмоток (U), которое затем реализуется инвертором с ШИМ в соответствии с алгоритмом коммутации (Табл.1).
В качестве сигнала обратной связи в контуре можно использовать трёхфазно-выпрямленные сигналы датчиков тока фаз или сигнал датчика тока в звене постоянного тока инвертора (![]() ).
).
На основе рассмотренного канала управления моментом можно строить внешние контуры управления скоростью и положением.
Однако
Если бы токи в обмотках спадали до нуля и нарастали до нужного уровня мгновенно, то момент двигателя, определяемый их величиной, в установившемся режиме был бы постоянным. В действительности же реальные переходные процессы при коммутации обмоток приводят к пульсациям момента. В зависимости от параметров обмоток, а также соотношения величин текущей ЭДС и напряжения звена постоянного тока эти пульсации могут быть различны по длительности, амплитуде и знаку.
Кроме этих коммутационных пульсаций в рассматриваемой системе также будут иметь место пульсации момента на частоте ШИМ.
Ниже приведен пример работы модели системы регулирования скорости. Данная модель построена в среде SimInTehc на элементах специализированного тулбокса «Электропривод». Среда позволяет получить максимальное приближение моделируемых процессов к реальности с учетом эффектов временной и уровневой дискретизации.
Часть модели, а именно - модель цифровой системы управления скоростью приведена ниже, на Рис.5. Регулятор скорости системы (Рег.W) выдаёт сигнал момента, который отрабатывается структурой построенной в соответствии с Рис.4.
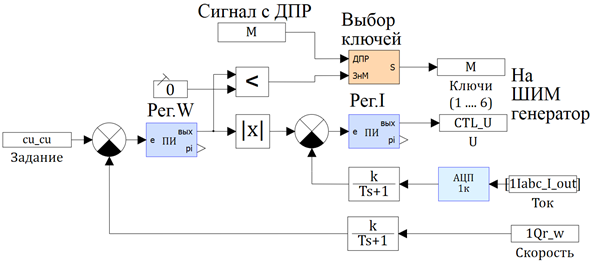
Рис. 5
Для управления был выбран двигатель со следующими параметрами:
Rs=2.875 Ом - сопротивление обмотки фазы
Ls=8.5e-3 Гн – индуктивность фазы
F=0.175 Вб – потокосцепление ротора
Zp=4 - число пар полюсов
Jr=0. 06 кг∙м2 - момент инерции ротора
Напряжение в звене постоянного тока привода было принято равным 100В.
В контуре тока электропривода использовалась ШИМ с частотой 5кГц.
В процессе регулирования происходило ступенчатое увеличение частоты при постоянном моменте сопротивления на валу двигателя (10 Нм).
Графики, полученные в процессе работы модели, приведены на Рис.6.

Рис.6
На графике момента видны существенные пульсации.
Отметим, что в основном они связаны именно с переходными процессами при коммутации обмоток и имеют соответственно частоту ушестерённую по отношению к заданной.
Пульсации, связанные с ШИМ, в данном случае, невелики.
Заметим, что коммутационные пульсации существенно возрастают при увеличении момента, что связано с увеличением тока.
Несколько спасает то, что их влияние на скорость снижает инерция.
А можно ли векторно управлять СДПМт?
Если очень хочется - то можно. Однако и здесь не без особенностей.
Математика и структура стандартной векторной системы управления исходит из синусоидальности поля в зазоре. При трапецеидальной ЭДС это условие нарушается, правда не очень сильно (трапеция это же почти синус).
А результатом этого «почти» будут опять же пульсации момента.
Вид модели цифровой системы векторного управления скоростью в среде SimInTech показан на Рис.7.

Рис.7
Ниже на Рис.8 показан график работы модели уже рассмотренного ранее СДПМт работающего в рассмотренном ранее режиме, но под управлением векторной системы.
В графике момента мы опять наблюдаем пульсации (хотя по сравнению с предыдущим вариантом они несколько уменьшились).
Причины пульсации при векторном управлении и управлении по ДПР различны, но их частота та же – ушестерённая по отношению к заданной.
Заметим, что вследствие несинусоидальности ЭДС токи в обмотках двигателя также будут принципиально несинусоидальными (это действительно так, хотя в масштабе графика на Рис.8 и не слишком заметно).

Рис.8
А можно ли с помощью коммутации обмоток по ДПР управлять двигателем с синусоидальной ЭДС?
С точки зрения автора можно – но не нужно.

Наряду с коммутационными пульсациями момента синусоидальность ЭДС (отсутствие плоской вершины трапеции) в данном случае неминуемо вызовет ещё и дополнительные пульсации, снижающие качество регулирования даже по сравнению с управляемым по ДПР двигателем СДПМт.
А при векторном управлении двигателем с синусоидальной ЭДС пульсаций момента не будет.
Для подтверждения этого тезиса ниже (Рис.9) приведены графики работы модели двигателя с рассмотренными ранее параметрами, но с синусоидальной ЭДС и векторной системой управления скоростью.
Видно, что пульсации момента в этом случае практически отсутствуют. При правильной настройке регуляторов системы они связаны только с ШИМ-преобразованием и для данного случая почти не видны.

Рис.9
Итоги
Для синхронников с страпецеидальной ЭДС - коммутация по ДПР.
Так же возможно использование и более сложного векторного алгоритма регулирования, что может дать снижение уровня пульсации момента.
Для синхронников с синусоидальной ЭДС лучший вариант это векторное регулирование.
Это сочетание идеально для построения точного электропривода (что собственно и так было понятно).
Ю.Н. Калачёв
Список литературы
[1] А. С. Пушкин «Полтава».







2. Если бы эти графики были бы сопоставлены с графиками с "живой" нагрузочной машины, то этому материалу цены бы не было.