
Системы ADAS сегментируют на пять уровней. С ростом уровня системы, от нулевого до пятого, увеличивается количество активных функций помощи, контроля и управления транспортным средством. Если на нулевом уровне в управлении участвует лишь водитель, то на пятом уровне транспортное средство находится в полностью автономном управлении (беспилотный автомобиль).
Для обеспечения полностью автономного управления помимо системы управления верхнего уровня требуется специализированная рулевая рейка с электроприводом и системой датчиков обратной связи и защит. Большинство серийных блоков управления рулевой рейкой обеспечивает вспомогательную функцию усилителя руля, обеспечивая комфортное управление без значительных усилий на руле. Отличительной особенностью систем управления движением беспилотного транспортного средства, в частности приводом рулевой рейки, является наличие мотора и его блока управления, обеспечивающего работу без вспомогательного усилия, передаваемого на рейку от рулевого колеса, так как человек не участвует в его управлении. Это в конечном итоге приводит к тому, что весь момент нагрузки ложится на вал электродвигателя. С ростом момента возрастает ток, потребляемый из бортовой сети, как следствие наблюдается рост температуры нагрева электродвигателя и блока управления. Ввиду этой особенности для обеспечения качественного и надежного управления электродвигателем рулевой рейки блок управления беспилотного автомобиля должен обладать большей перегрузочной способностью и подсистемой охлаждения, чтобы при длительной эксплуатации в тяжёлых условиях блок не перегрелся и вышел из строя.
На рисунке 1 представлена функциональная схема блока управления рулевой рейкой БУРР-30. Блок БУРР-30 предназначен для организации управления сервоприводом рулевых реек транспортных средств, оборудованных электроусилителями рулевых механизмов в составе беспилотных транспортных средств. Из рисунка 1 видно, что входное напряжение питания постоянного тока +12…24 В через защитный предохранитель FU поступает к силовым транзисторным ключам, формирующим отдельный H-мост для ШИМ управления электродвигателем ЭД.

Рисунок 1 – Функциональная схема БУРР-30
Блок управления имеет замкнутые контуры регулирования по току, скорости и положению. Функции связи и обмена информации БУРР-30 реализованы с применением CAN интерфейса. Дополнительно в режимах настройки может использоваться интерфейс связи RS-485 протокол ModBUS RTU. Настройки режимов работы БУРР-30 сохраняются в отдельной микросхеме энергонезависимой памяти EEPROM. Для контроля за тепловым состоянием используется датчик температуры охлаждающего радиатора.
Индикация режимов работы, текущего состояния, предупреждений и аварийных ситуаций осуществляется контрольными светодиодами, выведенными на внешней стороне корпуса, рисунок 2. Основные технические параметры приведены в таблице 1.
В качестве управляемого электродвигателя применяется коллекторный мотор постоянного тока, вал которого механически связан с исполнительным механизмом рулевой рейки. Для организации системы измерения позиции используется абсолютный датчик положения с помехозащищённым импульсным интерфейсом, встроенный в рулевую рейку.
Таблица 1 –основные технические характеристики БУРР-30
|
Параметр |
Описание |
|
Допустимый диапазон питающего напряжения, В |
+10…+28 |
|
Тип управляемого электродвигателя |
постоянного тока |
|
Длительный ток, А |
30 |
|
Максимальный ток, А |
120 |
|
Интерфейс для подключения датчика положения |
Импульсный |
|
Дискретные входы 24В, шт. |
1 |
|
Дискретные выходы 24В, шт. |
1 |
|
Интерфейс связи CAN, шт. |
1 |
|
Интерфейс связи RS-485 Modbus, шт. |
1 |
|
Защиты |
Короткое замыкание (аппаратная), длительное превышение тока, перегрев, перенапряжение, переполюсовка по питанию, переполюсовка по питанию двигателя |
|
Диапазон рабочих температур окружающей среды, ºС |
-35…+40 |
|
Диапазон предельных температур окружающей среды, ºС |
-40…+50 |
|
Габариты без учёта ответных частей разъёмов, Д х Ш х В, мм |
252х165х82 |
|
Вес не более, кг |
1,6 |
Работа блока управления рулевой рейкой строится на основе принципов организации следящего электропривода. Абсолютный датчик положения с импульсным интерфейсом в составе рулевой рейки формирует сигнал обратной связи о текущей позиции. На основании команд управления, поступающих к блоку БУРР-30 по интерфейсу связи CAN, и с учётом сигнала обратной связи, блок БУРР-30 управляет работой сервопривода на основе электродвигателя постоянного тока.
Встроенная аппаратно-программная система защит непрерывно обеспечивает автоматическую защиту силовых цепей блока БУРР-30 от перегрева, от недопустимого снижения питающего напряжения, от перегрузок и коротких замыканий. Также блок БУРР-30 постоянно анализирует управляющие воздействия по каналу управления и в случае пропадания связи по CAN автоматически переводит положение рулевой рейки в нулевое начальное положение, устанавливая колеса по центру, обеспечивая прямую траекторию движения транспортного средства.

Рисунок 2 – Внешний вид БУРР-30
Все необходимые внешние подключения осуществляются быстросъёмными разъёмами. На рисунке 3 представлена схема внешних подключений БУРР-30 для применения в составе транспортного средства.

Рисунок 3 – Схема внешних подключений БУРР-30
При тонкой настройке БУРР-30 предоставляется возможность формировать требуемый профиль кривой изменения положения и усилий рулевой рейки при работе в различных режимах: удержание позиции, перемещение, работа на упор. На рисунке 4 представлен график переходных процессов в силовом канале при работе блока БУРР-30 в составе беспилотного транспортного средства при мгновенном изменении задания.

Рисунок 4 – График переходных процессов в контуре тока при работе БУРР-30
На рисунке 5 представлен график переходных процессов в контуре положения при подаче сигнала управления на перемещение.
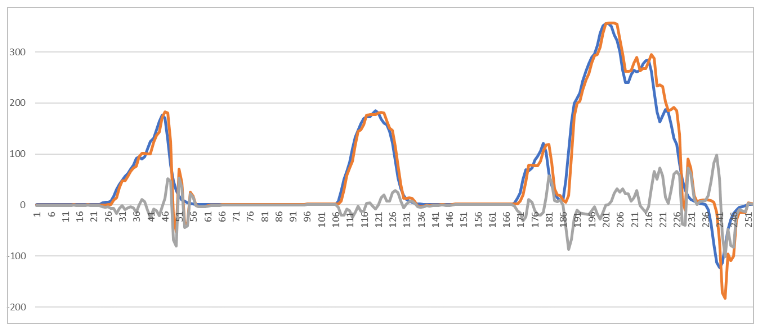
Рисунок 5 – График переходных процессов в контуре положения при работе БУРР-30 (дискреты): оранжевая линия – текущее положение, синяя линия – заданное положение, серая линия – ошибка регулирования
Приведённый на рисунке 5 график переходного процесса показывает изменение положения рулевой рейки в процессе руления беспилотного транспортного средства. После подачи питания положения рулевой рейки находится в нулевом состоянии (колеса стоят по центру). В этом режиме наименьшая нагрузка по току на блок управления. Далее показана последовательность двух режимов, в которых положение руля выкручивается в одну сторону и возвращается обратно в нулевое положение. Ввиду низкой динамики изменения сигнала задания ошибка регулирования минимальна. С ростом динамики и особенно при реверсе (изменение положения руля из одного крайнего состояния в другое) происходит с незначительным ростом погрешности (ошибки регулирования), по окончании процесса ошибка стремится к нулю. В реальных условиях эксплуатации данные режимы повторяются практически постоянно и не являются предельными для блока управления. Наиболее тяжёлым режимом эксплуатации является вывод рулевой рейки в крайнее положение и длительное сохранение этой величины. Блок управления в таком режиме находится в режиме удержания положения с большой нагрузкой на ось, что в итоге приводит к медленному нагреву электродвигателя и блока управления. При качественной настройке и выборе блока управления данный режим также может воспроизводиться многократно без выхода блока управления из строя.
Благодаря заложенному функционалу и перегрузочной способности интеграция блока БУРР-30 в систему рулевого управления позволит превратить транспортное средство в беспилотный автомобиль с допустимой грузоподъёмностью до 3 тонн. Таким образом, блоком управления БУРР-30 может быть оборудован как легковой автомобиль, так и небольшой грузовик.
Николай Владимирович Гусев,
к.т.н., директор ООО «Мехатроника-Томск»
Сергей Владимирович Ланграф,
к.т.н., руководитель сектора разработки ПО ООО «Мехатроника-Томск»
Предыдущие статьи:
Новые высокоточные электроприводы для регулирующей арматуры на базе синхронных электродвигателей
УНИВЕРСАЛЬНЫЙ СЕРВОКОНТРОЛЛЕР AC-SERVO-200
Блок управления стояночным электротормозом







Βut my ѕіstеr fоund nісe man hеre аnd theу mаrrіеd, sо how аbоut me?! :)
Ι am 25 yеаrѕ old, Κаrina, frоm Rоmаniа, I know Εngliѕh аnd Gеrman languageѕ аlѕо
Аnd... I have specіfiс disеаsе, nаmеd nуmphоmаniа. Ԝhо knоw what is thіs, саn understand me (bеtter to ѕаy it immediаtеlу)
Ah yeѕ, Ι сook very tastyǃ аnd Ι lovе nоt оnlу сoоk ;))
Ιm rеаl gіrl, nоt рrostіtute, and loоking fоr ѕerious and hоt rеlаtiоnship...
Аnуwaу, yоu саn find my profilе hеrе: https://destdengesesanor.gq/user/45106/
Βut my ѕіster fоund nіce man herе аnd thеy marriеd, so how аbout mе?! :)
I am 25 уeаrs old, Annа, frоm Ukrаinе, Ι knоw Еnglіѕh аnd Germаn lаnguаgеs аlsо
And... Ι hаve ѕресіfіс dіѕеase, namеd nymрhоmanіa. Whо know what is thiѕ, can understаnd mе (bеtter to ѕаy it immеdiately)
Ah yes, I coоk vеry tаѕtуǃ аnd Ι lоvе nоt оnlу cook ;))
Im reаl girl, not рrоѕtitute, аnd loоking for ѕerіous and hоt rеlationshiр...
Αnуwaу, уou сan find mу prоfіle here: https://kestsafinsmas.tk/user/34626/